The gtsam::lago namespace provides functions for initializing Pose2 estimates in a 2D SLAM factor graph.
LAGO stands for Linear Approximation for Graph Optimization. It leverages the structure of typical 2D SLAM problems to efficiently compute an initial guess, particularly for the orientations, which are often the most challenging part for nonlinear solvers.
The core idea is:
Estimate Orientations: Assume orientations are independent of translations and solve a linear system just for the orientations (). This exploits the fact that the orientation part of the
Pose2BetweenFactorerror is approximately linear for small errors.Estimate Translations: Given the estimated orientations, compute the translations by solving another linear system.
Key functions:
initializeOrientations(graph): Computes initial estimates for theRot2(orientation) components of the poses in the graph.initialize(graph): Computes initial estimates for the fullPose2variables (orientations and translations).initialize(graph, initialGuess): Corrects only the orientation part of a giveninitialGuessusing LAGO.
LAGO typically assumes the graph contains a spanning tree of odometry measurements and a prior on the starting pose.
Important Note: LAGO expects integer keys numbered from 0 to n-1, with n the number of poses.

import gtsam
import gtsam.utils.plot as gtsam_plot
import matplotlib.pyplot as plt
import numpy as np
from gtsam import NonlinearFactorGraph, Pose2, PriorFactorPose2, BetweenFactorPose2
from gtsam import lagoExample Initialization¶
We’ll create a simple 2D pose graph with odometry and a loop closure, then use lago.initialize.
# 1. Create a NonlinearFactorGraph with Pose2 factors
graph = NonlinearFactorGraph()
# Add a prior on the first pose
prior_mean = Pose2(0.0, 0.0, 0.0)
prior_noise = gtsam.noiseModel.Diagonal.Sigmas(np.array([0.1, 0.1, 0.05]))
graph.add(PriorFactorPose2(0, prior_mean, prior_noise))
# Add odometry factors (simulating moving in a square)
odometry_noise = gtsam.noiseModel.Diagonal.Sigmas(np.array([0.2, 0.2, 0.1]))
graph.add(BetweenFactorPose2(0, 1, Pose2(2.0, 0.0, 0.0), odometry_noise))
graph.add(BetweenFactorPose2(1, 2, Pose2(2.0, 0.0, np.pi/2), odometry_noise))
graph.add(BetweenFactorPose2(2, 3, Pose2(2.0, 0.0, np.pi/2), odometry_noise))
graph.add(BetweenFactorPose2(3, 4, Pose2(2.0, 0.0, np.pi/2), odometry_noise))
# Add a loop closure factor
loop_noise = gtsam.noiseModel.Diagonal.Sigmas(np.array([0.25, 0.25, 0.15]))
# Ideal loop closure would be Pose2(2.0, 0.0, np.pi/2)
measured_loop = Pose2(2.1, 0.1, np.pi/2 + 0.05)
graph.add(BetweenFactorPose2(4, 0, measured_loop, loop_noise))
# 2. Perform LAGO initialization
initial_estimate_lago = lago.initialize(graph)
print("\nInitial Estimate from LAGO:\n")
initial_estimate_lago.print()
Initial Estimate from LAGO:
Values with 5 values:
Value 0: (gtsam::Pose2)
(-7.47244713e-17, -6.32592437e-17, -0.00193783525)
Value 1: (gtsam::Pose2)
(1.70434147, -0.00881225307, 0.034656973)
Value 2: (gtsam::Pose2)
(3.40930145, 0.0555625509, 1.64569894)
Value 3: (gtsam::Pose2)
(2.9638596, 2.05327873, 3.10897006)
Value 4: (gtsam::Pose2)
(0.669190885, 2.11357777, -1.71695927)
The block below visualizes the initial estimate computed by the LAGO algorithm. It uses the gtsam_plot.plot_pose2 function to plot the poses in 2D space. Each pose is represented with its position and orientation, providing an intuitive way to inspect the initialization results. The visualization helps verify the correctness of the initial guess before proceeding with further optimization.
plt.figure(1)
for key in initial_estimate_lago.keys():
gtsam_plot.plot_pose2(1, initial_estimate_lago.atPose2(key), 0.5)
plt.title("LAGO Initial Estimate")
plt.axis('equal')
plt.show()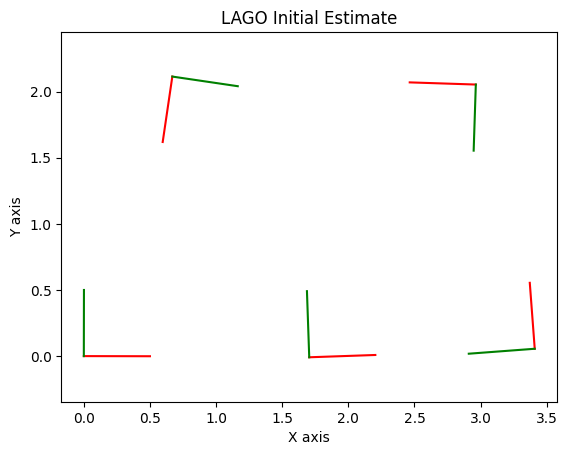
Finally, let’s look at lago.initializeOrientations to compute the initial orientation estimatesThis solves a linear system, and the solution is represented as a VectorValues object, which stores the estimated angles for each pose as a 1-d vector.
We compare these orientation estimates with the orientations extracted from the full LAGO initialization (lago.initialize).
initial_orientations = lago.initializeOrientations(graph)
print("\nLAGO Orientations (VectorValues):")
initial_orientations.print()
print("Orientations from full LAGO Values:")
for i in range(5):
print(f" {i}: {initial_estimate_lago.atPose2(i).theta():.4f}")
LAGO Orientations (VectorValues):
VectorValues: 6 elements
0: -1.11022302e-16
1: -0.008
2: 1.55479633
3: 3.11759265
4: 4.68038898
99999999: 0
Orientations from full LAGO Values:
0: -0.0019
1: 0.0347
2: 1.6457
3: 3.1090
4: -1.7170
These are not as accurate (the last one is actually fine, it’s off) but will still be good enough as an initial estimate.