GTSAM Copyright 2010-2022, Georgia Tech Research Corporation,
Atlanta, Georgia 30332-0415
All Rights Reserved
Authors: Frank Dellaert, et al. (see THANKS for the full author list)
See LICENSE for the license information
Typically, 3D rotations are used in GTSAM via the class Rot3, which can use either SO3 or Quaternion as the underlying representation.
gtsam.SO3 is the 3x3 matrix representation of an element of SO(3), and implements all the Jacobians associated with the group structure.
This document documents some of the math involved.
SO3 implements the exponential map and its inverse, as well as their Jacobians. For more information on Lie groups and their use here, see GTSAM concepts.
# Install GTSAM and Plotly from pip if running in Google Colab
try:
import google.colab
%pip install --quiet gtsam-develop
except ImportError:
pass # Not in Colab
The exponential map for SO(3) converts a 3D rotation vector ω (corresponding to a Lie algebra element [ω]× in so(3)) into a rotation matrix (Lie group element in SO(3)). I.e., we map a rotation vector ω∈R3 to a rotation matrix R∈SO(3).
The logarithm map for SO(3) is the inverse of the exponential map It converts a rotation matrix R∈SO(3) into a 3D rotation vector (corresponding to a Lie algebra element [\boldsymbol{\omega}]_\times in so(3)).
Given a rotation matrix R, the corresponding rotation vector ω∈R3 is computed as:
The Jacobians defined in SO3.h describe how small changes in the so(3) tangent space (represented by a 3-vector ω) relate to small changes on the SO(3) manifold (represented by rotation matrices R). They are crucial for tasks like uncertainty propagation, state estimation (e.g., Kalman filtering), and optimization (e.g., bundle adjustment) involving rotations.
Definitions:
Let ω be a vector in the tangent space so(3), θ=∥ω∥ be the rotation angle, and Ω=ω∧ be the 3x3 skew-symmetric matrix corresponding to ω. The key coefficients used are:
A=sin(θ)/θ
B=(1−cos(θ))/θ2
C=(1−A)/θ2=(θ−sin(θ))/θ3
D=(1/θ2)(1−A/(2∗B))
Note: Taylor series expansions are used for these coefficients when θ is close to zero for numerical stability.
As explained in detail in Jacobians via Kernels..., the exponential map and its Jacobians are implemented using a small “functor”, gtsam::so3::DexpFunctor, implemented in SO3.*. It defines both a Jacobian and InvJacobian kernel, that implement both left and right variants. You instantiate DexpFunctor with the value of the rotation vector ω.
Relationship to Expmap: Relates a small change δ in the tangent space so(3) to the corresponding small rotation applied on the right on the manifold SO(3).
Explanation: This Jacobian maps a perturbation δ in the tangent space (at the origin) to the equivalent perturbation τ=Jr(ω)δ in the tangent space atR=Exp(ω), such that the change on the manifold corresponds to right multiplication by Exp(τ). It represents the derivative of the exponential map considering right-composition (dexp). Often associated with perturbations in the body frame.
Synonyms: Right Jacobian of Exp, dexp, Differential of Exp (right convention).
Relationship to Expmap: Relates a small change δ in the tangent space so(3) to the corresponding small rotation applied on the left on the manifold SO(3).
Explanation: This Jacobian maps a perturbation δ in the tangent space (at the origin) to the equivalent perturbation τ=Jl(ω)δ in the tangent space atR=Exp(ω), such that the change on the manifold corresponds to left multiplication by Exp(τ). Often associated with perturbations in the world frame. Note that Jl(ω)=Jr(−omega).
Synonyms: Left Jacobian of Exp, Differential of Exp (left convention).
3. Inverse Right Jacobian or “invDexp” (InvJacobian().right())¶
Formula:Jr−1(ω)=I+0.5Ω+DΩ2
Relationship to Logmap: Relates a small rotation perturbation τ applied on the right of a rotation R=Exp(ω) back to the resulting change in the logarithm map vector (tangent space coordinates).
Explanation: This Jacobian maps a small rotation increment τ (applied in the body frame, i.e., right multiplication) to the corresponding change in the so(3) coordinates ω. It is the derivative of the logarithm map when considering right perturbations. This is frequently needed in optimization algorithms that parameterize updates using right perturbations.
Synonyms: Inverse Right Jacobian of Exp, invDexp, Right Jacobian of Log (often implied by context).
Relationship to Logmap: Relates a small rotation perturbation τ applied on the left of a rotation R=Exp(ω) back to the resulting change in the logarithm map vector (tangent space coordinates).
Explanation: This Jacobian maps a small rotation increment τ (applied in the world frame, i.e., left multiplication) to the corresponding change in the so(3) coordinates ω. It is the derivative of the logarithm map when considering left perturbations. Note that Jl−1(ω)=Jr−1(−ω).
Synonyms: Inverse Left Jacobian of Exp, Left Jacobian of Log (often implied by context).
where δ∈so(3) is a tangent space increment,and hence we naturally uses the right Jacobian Jr(ω) for the related derivatives.
This choice is also known as right trivialization. This means we relate the tangent space at any rotation R back to the tangent space at the identity (the Lie algebra so(3)) using the differential of right multiplication.
Note that this choice is left-invariant, because we can multiply with an arbitrary rotation matrix R′ on the left above, on both sides, and the update would not be affected. This term is often used in control theory, referring to how error states are defined or how system dynamics evolve relative to a world frame.
Even with the right-multiplication convention, the left Jacobians (associated with world-frame perturbations, R′=Exp(τ)⋅R) are used in several other places, most notably in Building Jacobians for the SE(3) group (Pose3).
SO(3) Jacobian Coefficients Near Zero: Taylor Expansions
When working with the exponential map (Exp) and logarithm map (Log) for SO(3), and especially their Jacobians, we encounter several coefficients that depend on the rotation angle θ=∣∣ω∣∣, where ω∈so(3) is the tangent vector.
These coefficients appear in the formulas for the Jacobians and the Exp map itself:
Exp(ω)=I+A⋅W+B⋅W2
Jr(ω)=I−B⋅W+C⋅W2 (Right Jacobian of Exp)
Jl(ω)=I+B⋅W+C⋅W2 (Left Jacobian of Exp)
Jr−1(ω)=I+21W+D⋅W2 (Inverse Right Jacobian)
Jl−1(ω)=I−21W+D⋅W2 (Inverse Left Jacobian)
where W=ω∧ is the skew-symmetric matrix corresponding to ω.
As the rotation angle θ approaches zero, the standard formulas for these coefficients become numerically unstable due to division by zero or indeterminate forms like 0/0.
A: 0sin(0)→00
B: 021−cos(0)→00
C: 030−sin(0)→00
D: Involves A and B.
Direct computation using floating-point arithmetic near θ=0 leads to loss of precision or NaN results.
To maintain numerical stability and accuracy near θ=0, we replace the exact formulas with their Taylor series expansions around θ=0. GTSAM’s ExpmapFunctor and DexpFunctor use expansions including the θ2 term, which provides good accuracy for small angles.
A=1−6θ2+O(θ4)
B=21−24θ2+O(θ4)
C=61−120θ2+O(θ4)
D=121+720θ2+O(θ4)
Let’s visualize how well these approximations work near θ=0.
SO(3) Jacobian Coefficients Near Singularities: GTSAM Calculation¶
This notebook visualizes how GTSAM’s DexpFunctor calculates the Jacobian coefficients C and D near the singularities at θ=0 and θ=π. It compares the values computed by GTSAM (which uses Taylor expansions in the singular regions) against the exact mathematical formulas.
import numpy as np
import matplotlib.pyplot as plt
import gtsam
import math
# --- Constants from GTSAM
near_zero_threshold_sq = 1e-6
near_pi_threshold_sq = 1e-6
near_zero_threshold = np.sqrt(near_zero_threshold_sq)
near_pi_delta_threshold = np.sqrt(near_pi_threshold_sq) # delta = pi - theta
# --- Define Exact Calculation Functions (for comparison) ---
# Constants for exact limits
one_6th = 1.0 / 6.0
one_12th = 1.0 / 12.0
def A_exact(theta):
theta = np.asarray(theta)
return np.divide(np.sin(theta), theta, out=np.ones_like(theta), where=(theta != 0))
def B_exact(theta):
theta = np.asarray(theta)
theta2 = theta**2
# Stable 1-cos using 2*sin^2(theta/2)
sin_half_theta = np.sin(theta / 2.0)
one_minus_cos = 2.0 * sin_half_theta**2
return np.divide(one_minus_cos, theta2, out=np.full_like(theta, 0.5), where=(theta2 != 0))
def C_exact(theta):
theta = np.asarray(theta)
theta2 = theta**2
a = A_exact(theta)
# Limit C -> 1/6 as theta -> 0
return np.divide(1.0 - a, theta2, out=np.full_like(theta, one_6th), where=(theta2 != 0))
def D_exact(theta):
theta = np.asarray(theta)
theta2 = theta**2
a = A_exact(theta)
b = B_exact(theta)
# Avoid division by zero if b is zero away from theta=0 (unlikely)
# Use np.isclose for safer check near zero? But b should be ~0.5 near theta=0
safe_b = np.where(np.abs(b) < 1e-20, 1e-20, b)
term = 1.0 - a / (2.0 * safe_b)
# Limit D -> 1/12 as theta -> 0
return np.divide(term, theta2, out=np.full_like(theta, one_12th), where=(theta2 != 0))
# --- End Exact Functions ---
# --- Helper Function to Get GTSAM Coefficients ---
def get_gtsam_coeffs(theta_values):
"""Calculates coefficients A,B,C,D using GTSAM DexpFunctor."""
gtsam_A, gtsam_B, gtsam_C, gtsam_D = [], [], [], []
for theta in theta_values:
if theta == 0: # Handle exact zero case if needed
omega = np.array([0.0, 0.0, 0.0])
else:
# Use a simple axis, magnitude is theta
omega = np.array([theta, 0.0, 0.0])
try:
# Instantiate the functor using the Vector3 omega
# Assuming default C++ thresholds match the python ones above
# Pass thresholds explicitly if constructor allows, e.g.:
local = gtsam.so3.DexpFunctor(omega, 1, 1)
# Store computed coefficients (ensure wrapper exposes these!)
gtsam_A.append(local.A)
gtsam_B.append(local.B)
gtsam_C.append(local.C())
gtsam_D.append(local.D())
except Exception as e:
print(f"Error processing theta={theta}: {e}")
# Pad with NaN or handle error appropriately
gtsam_A.append(np.nan)
gtsam_B.append(np.nan)
gtsam_C.append(np.nan)
gtsam_D.append(np.nan)
return (np.array(gtsam_A), np.array(gtsam_B),
np.array(gtsam_C), np.array(gtsam_D))
def get_exact_coeffs(theta_values):
"""Calculates exact coefficients A,B,C,D."""
return (A_exact(theta_values), B_exact(theta_values),
C_exact(theta_values), D_exact(theta_values))
def plot_comparison(axs, theta_vals, gtsam_coeff, exact_coeff, coeff_name, threshold):
"""Helper to plot value and difference."""
# Value Plot
axs[0].semilogx(theta_vals, gtsam_coeff, '.', markersize=2, label=f'GTSAM {coeff_name}')
axs[0].semilogx(theta_vals, exact_coeff, '--', linewidth=1, label=f'Exact {coeff_name}')
grid_which = 'both' # Use 'both' for major/minor on log scale
if threshold is not None:
axs[0].axvline(threshold, color='r', linestyle=':', label=f'Threshold $\\theta \\approx {threshold:.2e}$') # Consistent threshold format
axs[0].set_ylabel(f'Value of {coeff_name}')
axs[0].set_title(f'Coefficient {coeff_name}')
axs[0].legend(fontsize='small')
axs[0].grid(True, which=grid_which)
# Difference Plot
diff = np.abs(gtsam_coeff - exact_coeff)
# Avoid log(0) or very small values for plotting differences
diff = np.maximum(diff, 1e-20)
axs[1].loglog(theta_vals, diff, 'r.', markersize=2)
axs[1].set_xscale('log') # Ensure x-axis is log
axs[1].set_yscale('log') # Ensure y-axis is log
if threshold is not None:
axs[1].axvline(threshold, color='r', linestyle=':')
axs[1].set_ylabel('Abs. Difference |GTSAM - Exact|')
axs[1].set_title(f'Difference for {coeff_name}')
axs[1].grid(True, which=grid_which)
# Generate theta values on a log scale near zero
theta_vals_zero = np.logspace(-7, -1.5, 1000) # From 1e-7 up to ~ 1.8 degrees
# Calculate coefficients
gtsam_A_z, gtsam_B_z, gtsam_C_z, gtsam_D_z = get_gtsam_coeffs(theta_vals_zero)
exact_A_z, exact_B_z, exact_C_z, exact_D_z = get_exact_coeffs(theta_vals_zero)
# Plot C and D near Zero
fig_zero, axs_zero = plt.subplots(4, 2, figsize=(12, 16), sharex=True)
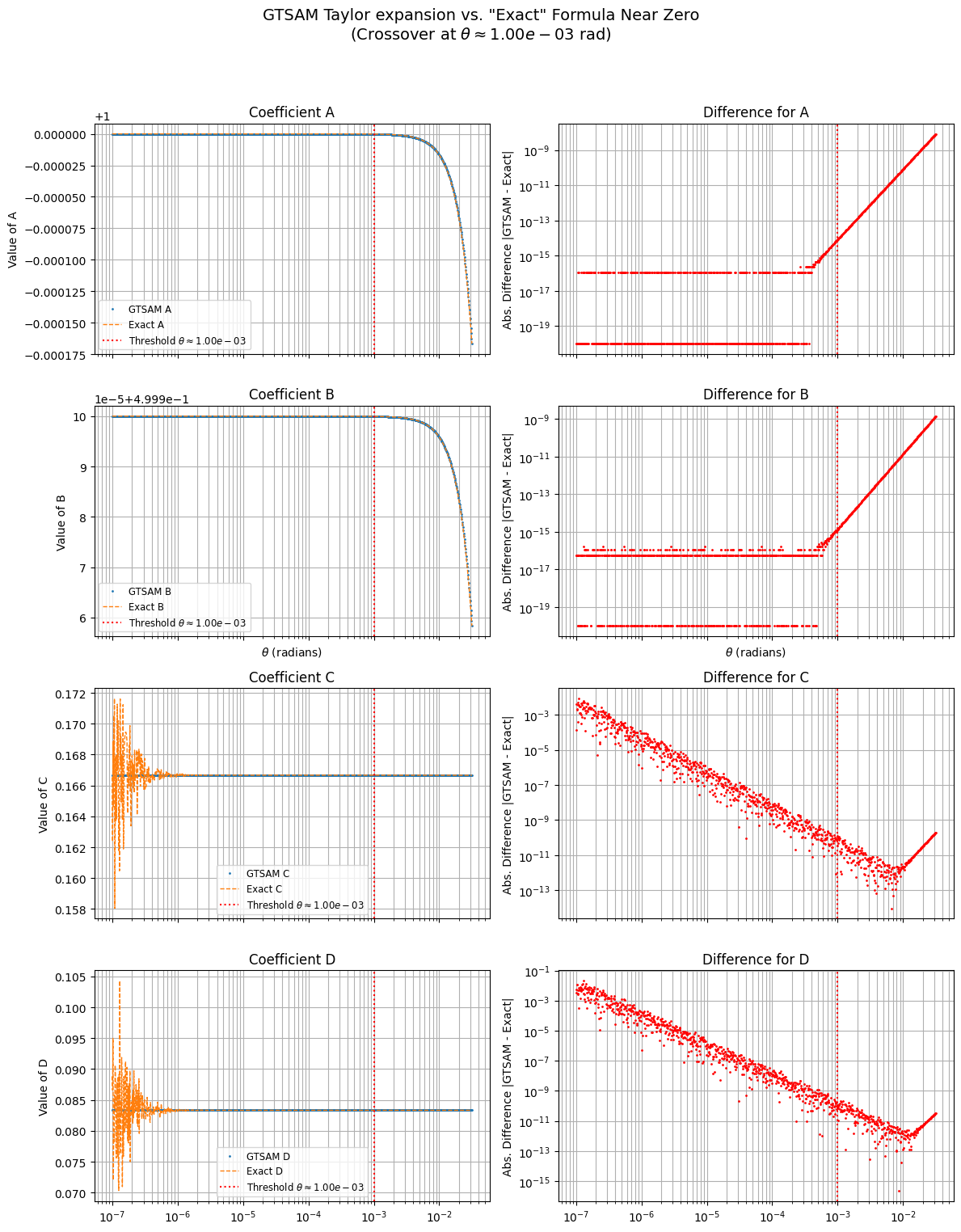
fig_zero.suptitle(f'GTSAM Taylor expansion vs. "Exact" Formula Near Zero\n(Crossover at $\\theta \\approx {near_zero_threshold:.2e}$ rad)', fontsize=14)
plot_comparison(axs_zero[0,:], theta_vals_zero, gtsam_A_z, exact_A_z, 'A', near_zero_threshold)
plot_comparison(axs_zero[1,:], theta_vals_zero, gtsam_B_z, exact_B_z, 'B', near_zero_threshold)
plot_comparison(axs_zero[2,:], theta_vals_zero, gtsam_C_z, exact_C_z, 'C', near_zero_threshold)
plot_comparison(axs_zero[3,:], theta_vals_zero, gtsam_D_z, exact_D_z, 'D', near_zero_threshold)
axs_zero[1, 0].set_xlabel("$\\theta$ (radians)")
axs_zero[1, 1].set_xlabel("$\\theta$ (radians)")
plt.tight_layout(rect=[0, 0.03, 1, 0.95]) # Adjust layout to prevent title overlap
plt.show()
Interpretation Near Zero:
The plots show the Taylor expansion values computed by GTSAM (. markers) and the “exact” mathematical formulas (-- lines). The red dotted line indicates the threshold θ=10−5≈0.00316 radians.
For A and B, the difference plot shows that the Taylor expansion introduces a small approximation error below the threshold. The error increases as θ moves away from 0. ForC and D the exact formula is itself hard to compute accurately, but we see that the error of the Taylor expansion starts going up only far from the threshold.
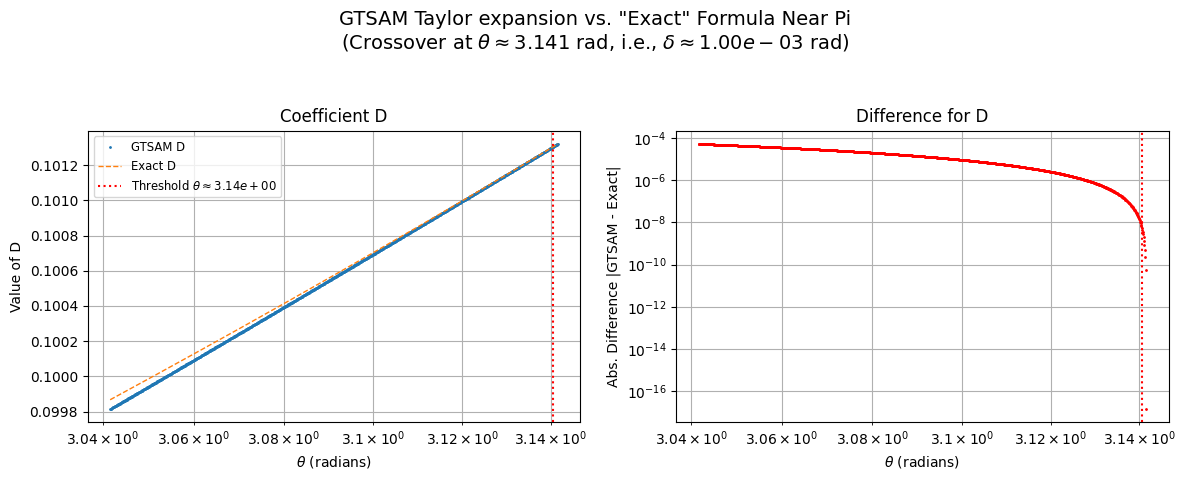
GTSAM specifically uses a Taylor expansion for coefficient D near π, as the standard formula becomes unstable. Other coefficients (A, B, C) are typically computed using their standard, stable forms near π.
# Generate theta values on a linear scale near pi
theta_vals_pi = np.linspace(
math.pi - 0.1, math.pi - 1e-9, 1000
) # Approach pi from below, up to ~6 deg away
# Calculate coefficients
gtsam_A_p, gtsam_B_p, gtsam_C_p, gtsam_D_p = get_gtsam_coeffs(theta_vals_pi)
exact_A_p, exact_B_p, exact_C_p, exact_D_p = get_exact_coeffs(theta_vals_pi)
# Calculate the theta value corresponding to the delta threshold
near_pi_theta_threshold = math.pi - near_pi_delta_threshold
# Plot only D near Pi
fig_pi, axs_pi = plt.subplots(1, 2, figsize=(12, 5))
fig_pi.suptitle(
r'GTSAM Taylor expansion vs. "Exact" Formula Near Pi'
+ f"\n(Crossover at $\\theta \\approx {near_pi_theta_threshold:.3f}$ rad, i.e., $\\delta \\approx {near_pi_delta_threshold:.2e}$ rad)",
fontsize=14,
)
plot_comparison(axs_pi, theta_vals_pi, gtsam_D_p, exact_D_p, "D", near_pi_theta_threshold)
axs_pi[0].set_xlabel("$\\theta$ (radians)")
axs_pi[1].set_xlabel("$\\theta$ (radians)")
plt.tight_layout(rect=[0, 0.03, 1, 0.93])
plt.show()
Interpretation Near Pi:
The plots focus on coefficient D as θ approaches π. The red dotted line indicates the threshold θ=π−10−3≈π−0.0316 radians.
We only plot the Taylor expansion. To the right of the threshold (closer to π) GTSAM will use this, and the difference plot shows the approximation error introduced by this Taylor expansion is small (less than 10e−8).