This notebook introduces gtsam.CustomFactor with a simple 1D tracking problem. We estimate a car’s position at five time steps and add three kinds of measurements one by one:
GPS factors on individual states
odometry factors between consecutive states
relative measurements to known landmarks
The goal is not realism. The goal is to show, as clearly as possible, how a Python callback becomes a factor in a GTSAM graph.

from functools import partial
from typing import Optional
import matplotlib.pyplot as plt
import numpy as np
import gtsam
np.set_printoptions(precision=2, suppress=True)1. Simulate a Simple 1D Trajectory¶
To keep the example focused on CustomFactor, each state is just a 1D vector containing the car’s position.
def simulate_car() -> np.ndarray:
"""Simulate a car moving at constant speed for one second."""
dt = 0.25 # 4 Hz, similar to a low-rate GPS.
speed = 144 * 1000 / 3600 # 144 km/h = 40 m/s.
return np.array([speed * dt * k for k in range(5)], dtype=float)
trajectory = simulate_car()
keys = [gtsam.symbol("x", k) for k in range(len(trajectory))]
print("Ground-truth positions:", trajectory)
print("Keys:", [gtsam.DefaultKeyFormatter(key) for key in keys])Ground-truth positions: [ 0. 10. 20. 30. 40.]
Keys: ['x0', 'x1', 'x2', 'x3', 'x4']
2. Create Noisy Measurements¶
We use three sensor types. GPS measures absolute position, odometry measures motion between consecutive states, and the landmark sensor measures the car’s position relative to a known landmark.
rng = np.random.default_rng(42)
sigma_gps = 3.0
sigma_odometry = 0.1
sigma_landmark = 1.0
gps_measurements = trajectory + rng.normal(0.0, sigma_gps, size=len(trajectory))
odometry_measurements = np.diff(trajectory) + rng.normal(0.0, sigma_odometry, size=len(trajectory) - 1)
landmark_positions = {0: 5.0, 3: 28.0}
landmark_measurements = {
0: (trajectory[0] - landmark_positions[0]) + rng.normal(0.0, sigma_landmark),
3: (trajectory[3] - landmark_positions[3]) + rng.normal(0.0, sigma_landmark),
}
gps_noise = gtsam.noiseModel.Isotropic.Sigma(1, sigma_gps)
odometry_noise = gtsam.noiseModel.Isotropic.Sigma(1, sigma_odometry)
landmark_noise = gtsam.noiseModel.Isotropic.Sigma(1, sigma_landmark)
print("GPS measurements:", gps_measurements)
print("Odometry measurements:", odometry_measurements)
print("Landmark-relative measurements:", landmark_measurements)GPS measurements: [ 0.91415124 6.88004768 22.25135359 32.82169415 34.14689443]
Odometry measurements: [ 9.86978205 10.01278404 9.96837574 9.99831988]
Landmark-relative measurements: {0: np.float64(-5.85304392757358), 3: np.float64(2.8793979748628287)}
3. Define Custom Residual Callbacks¶
A Python CustomFactor callback always has the same shape:
callback(this, values, jacobians) -> residualWhen GTSAM asks for Jacobians, we write them into the jacobians list.
ID_1X1 = np.eye(1)
def error_gps(
measurement: float,
this: gtsam.CustomFactor,
values: gtsam.Values,
jacobians: Optional[list[np.ndarray]],
) -> np.ndarray:
key = this.keys()[0]
estimate = values.atVector(key)
if jacobians is not None:
jacobians[0] = ID_1X1
return estimate - np.array([measurement])
def error_odometry(
measurement: float,
this: gtsam.CustomFactor,
values: gtsam.Values,
jacobians: Optional[list[np.ndarray]],
) -> np.ndarray:
key1, key2 = this.keys()
position1 = values.atVector(key1)
position2 = values.atVector(key2)
if jacobians is not None:
jacobians[0] = -ID_1X1
jacobians[1] = ID_1X1
return (position2 - position1) - np.array([measurement])
def error_landmark(
landmark_position: float,
measurement: float,
this: gtsam.CustomFactor,
values: gtsam.Values,
jacobians: Optional[list[np.ndarray]],
) -> np.ndarray:
key = this.keys()[0]
position = values.atVector(key)
if jacobians is not None:
jacobians[0] = ID_1X1
return (position - landmark_position) - np.array([measurement])4. Build and Solve Graphs¶
To make the comparison easy to read, we use a small helper that builds a factor graph with different sensor combinations.
def make_initial_values() -> gtsam.Values:
initial = gtsam.Values()
for key in keys:
initial.insert(key, np.array([0.0]))
return initial
def optimize_graph(graph: gtsam.NonlinearFactorGraph) -> gtsam.Values:
params = gtsam.GaussNewtonParams()
return gtsam.GaussNewtonOptimizer(graph, make_initial_values(), params).optimize()
def build_graph(
*, use_odometry: bool = False, use_landmarks: bool = False
) -> gtsam.NonlinearFactorGraph:
graph = gtsam.NonlinearFactorGraph()
# A GPS factor touches one state.
for key, measurement in zip(keys, gps_measurements):
graph.add(
gtsam.CustomFactor(gps_noise, [key], partial(error_gps, float(measurement)))
)
# An odometry factor couples two consecutive states.
if use_odometry:
for key1, key2, measurement in zip(keys[:-1], keys[1:], odometry_measurements):
graph.add(
gtsam.CustomFactor(
odometry_noise,
[key1, key2],
partial(error_odometry, float(measurement)),
)
)
# A landmark factor uses a known landmark position and a relative measurement.
if use_landmarks:
for index, landmark_position in landmark_positions.items():
graph.add(
gtsam.CustomFactor(
landmark_noise,
[keys[index]],
partial(
error_landmark,
float(landmark_position),
float(landmark_measurements[index]),
),
)
)
return graph
def result_array(result: gtsam.Values) -> np.ndarray:
return np.array([result.atVector(key)[0] for key in keys])5. Compare Three Sensor Suites¶
results = {}
for label, use_odometry, use_landmarks in [
("GPS only", False, False),
("GPS + odometry", True, False),
("GPS + odometry + landmarks", True, True),
]:
graph = build_graph(use_odometry=use_odometry, use_landmarks=use_landmarks)
result = optimize_graph(graph)
estimate = result_array(result)
results[label] = estimate
print(f"{label:28s} {estimate} graph error = {graph.error(result):.3f}")GPS only [ 0.91415124 6.88004768 22.25135359 32.82169415 34.14689443] graph error = 0.000
GPS + odometry [-0.48523821 9.38298896 19.39699917 29.36342957 39.3559616 ] graph error = 3.083
GPS + odometry + landmarks [-0.04999492 9.82674634 19.84976371 29.82570434 39.8177233 ] graph error = 4.030
6. Visualize the Improvement¶
time = np.arange(len(trajectory))
plt.figure(figsize=(8, 4))
plt.plot(time, trajectory, "k-o", label="ground truth")
for label, estimate in results.items():
plt.plot(time, estimate, marker="o", label=label)
plt.xlabel("time step")
plt.ylabel("position (m)")
plt.title("CustomFactor sensor fusion in 1D")
plt.grid(alpha=0.3)
plt.legend()
plt.show()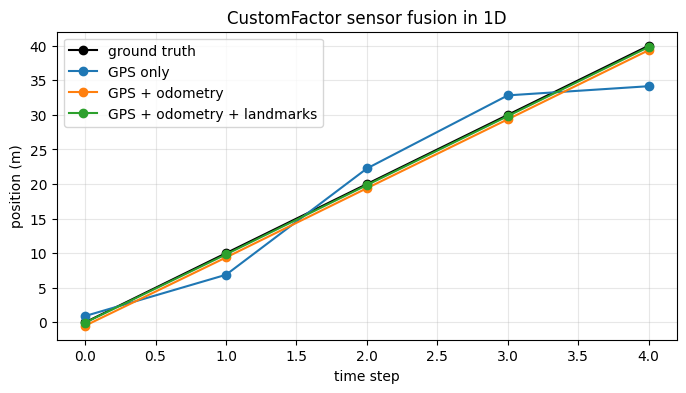
Takeaways¶
CustomFactorlets you describe a factor by writing just a residual callback.The callback can capture measurements and any other constants it needs.
Once the callback is wrapped in a factor, the rest of the workflow is standard GTSAM: build a graph, initialize variables, and optimize.